


分類:ハーネスアセンブリ

一、極細同軸線束の特性と優位性
極細同軸線束は内导体、絶縁層、シールド層、および外被覆で構成されており、優れた電磁干渉抵抗能力と正確な抵抗制御を持っています。その小さな直径と高い柔軟性により、ロボット内部のスペースが限られた応用環境に特に適しています。同時に、高速な信号伝送が可能であり、減衰や歪みが少ないです。伝統的な配線や通常のケーブルに比べて、極細同軸線束は高周波、高精度のシーンで信号の完全性を維持し、ロボットAIモジュールの性能発揮に信頼性の高い保障を提供します。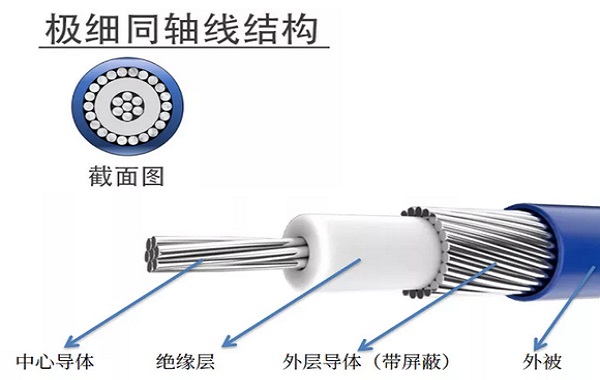
二、ロボットAIモジュールの適用シーン
視覚システムでは、カメラとメインコントロールチップ間のデータ伝送は、MIPI-CSI/DSIなどの高速インターフェースを使用することが一般的です。これにより、信号の完全性に対する要求が非常に高くなります。IMU、レーザーレーダーや距離計などのセンサーモジュールも、安定した高速データ収集と伝送が必要です。無線通信モジュールの射频信号の配線は、データの信頼性を確保するために低損耗、高遮蔽性のケーブルに依存します。また、異なるボードやモジュール間の高速データリンクも、良質なインピーダンスマッチングと干渉抵抗が必要であり、複雑な環境でのロボットの安定した動作を確保するために必要です。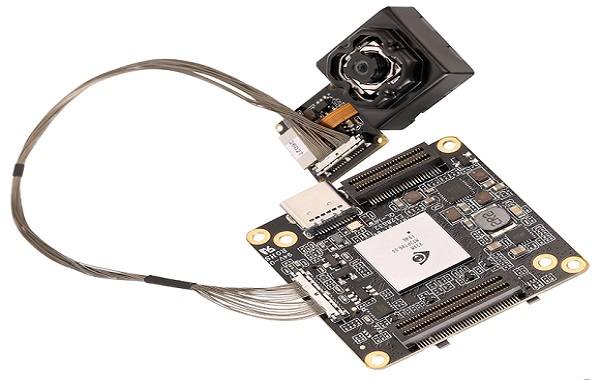
第3章 布线設計と最適化ポイント
合理な配線設計は信号の安定性を保証する鍵です。まず、伝送経路をできるだけ短くし、不必要な曲がりを避け、また、曲がり半径がケーブルの許容値を超えないようにします。シールド層は接地と連続する必要があり、ノイズや交叉干渉を防止する必要があります。ケーブルとコネクタのインピーダンスのマッチングは厳重に管理され、信号の反射を避ける必要があります。端子処理は正確な剥き線と圧着が必要であり、不良な工程がもたらす損耗を減らすことが重要です。ロボットの運動関節や振動環境には、柔軟な被覆を追加し、線カップを使用して固定し、配線が完了した後には信号のテストを行い、波形、周波数、干渉抵抗性能が予測に一致することを確認します。これらの措置を通じて、信号の歪み、干渉、接続の不安定さなどの問題を効果的に低減し、ロボットシステムの信頼性と寿命を向上させることができます。
免責内容








